안녕하세요! 최근 자율주행과 로봇 비전 분야에서 가장 뜨거운 감자인 3D Reconstruction 기술들을 정리한
인터랙티브 웹 페이지를 제작하여 공유합니다.
자율주행 환경에서 주변 사물을 어떻게 인식하고 지도로 만드는지,
복잡한 알고리즘들을 직관적으로 비교해 보고 싶어 이번 프로젝트를 시작하게 되었습니다.
🛠️ 왜 이 페이지를 만들었나요?
3D Reconstruction 기술은 전통적인 기하학 방식부터 최신 AI 기반 방식까지 범위가 매우 넓습니다.
- "COLMAP 같은 고전 방식과 SurroundOcc 같은 최신 방식의 차이는 뭘까?"
- "실시간성이 중요한 자율주행에서는 어떤 알고리즘이 유리할까?"
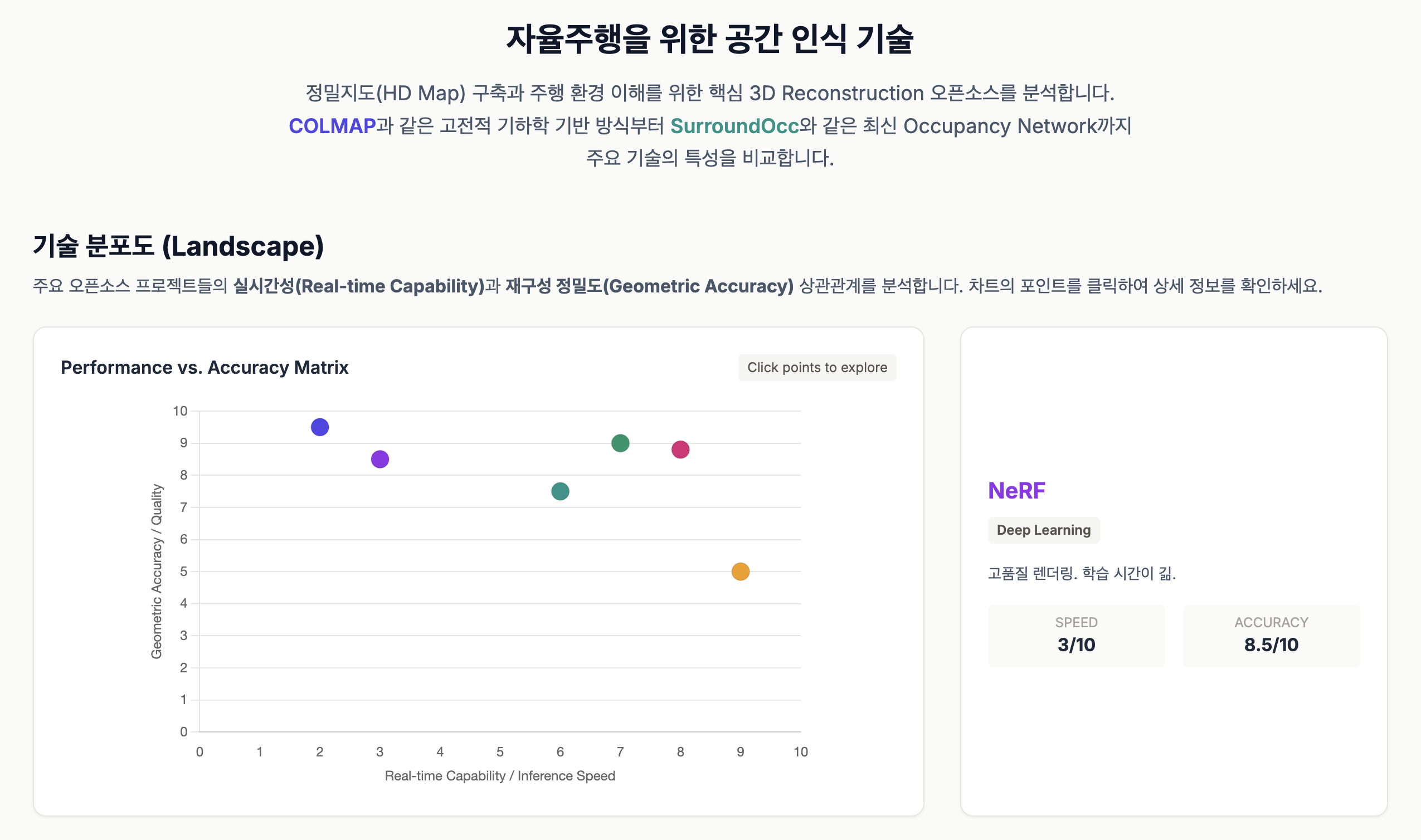
이런 궁금증을 가진 분들을 위해 정밀도(Accuracy) vs 실시간성(Real-time capability)을 축으로 한
대시보드를 구축했습니다.
🌟 주요 기능 및 하이라이트
1. 인터랙티브 기술 지형도 (Landscape Dashboard)
단순한 리스트가 아닙니다. Chart.js를 활용해 알고리즘별 성능을 시각화했습니다.
차트 위의 점을 클릭하면 해당 기술의 핵심 요약을 즉시 확인할 수 있습니다.
2. Deep Dive: 전통과 현대의 만남
- COLMAP (Classical Geometric): SfM(Structure from Motion) 파이프라인의 정수를 담았습니다.
정밀한 맵 생성이 필요할 때 왜 여전히 강력한지 설명합니다. - SurroundOcc (Deep Learning Occupancy): 최신 트렌드인 Occupancy Network를 다룹니다.
자율주행 차량이 주변 공간을 어떻게 '부피(Volume)' 단위로 이해하는지 분석했습니다. - Gaussian Splatting: 최근 가장 핫한 3D 가우시안 스플래팅 기술의 위치도 함께 확인하실 수 있습니다.
3. 성능 벤치마크 데이터
추론 속도와 재구성 품질(mIoU 등)을 동적인 차트로 구성하여,
이론적인 내용뿐만 아니라 실제 엔지니어링 관점에서의 지표도 비교 가능합니다.
🔗 바로가기
https://hms-gymnopedie.github.io/3d_reconstruction_survey/
3D Reconstruction for Autonomous Driving: Open Source Landscape
✨ 3D Gaussian Splatting (Emerging Tech) 최근 자율주행 맵핑 분야에서 급부상 중인 기술입니다. 수백만 개의 3D Gaussian 타원체를 이용해 장면을 표현합니다. NeRF보다 학습과 렌더링 속도가 훨씬 빠르며,
hms-gymnopedie.github.io
자율주행이나 로보틱스에 관심 있는 분들께 작은 도움이 되길 바랍니다. 피드백은 언제나 환영입니다! 🚀
- #3DReconstruction (가장 핵심적인 기술 명칭)
- #자율주행 (프로젝트의 주요 응용 분야)
- #SurroundOcc (최신 딥러닝 옥큐판시 네트워크 강조)
- #COLMAP (전통적인 SfM 방식의 대표 주자)
- #OccupancyNetwork (최신 자율주행 인지 기술 트렌드)
- #로보틱스 (SLAM 및 맵 빌딩 관련 핵심 카테고리)
- #ComputerVision (기술의 근간이 되는 분야)
- #OpenSource (오픈소스 프로젝트 정리임을 강조)
- #MapBuilding (지도 제작 및 정밀 지도 관련 키워드)
- #DigitalTwin (3D 재구성 기술이 확장되는 최신 산업 키워드)
'🤖 Robotics, 로봇 > 개요' 카테고리의 다른 글
| 논문, 제발 처음부터 읽지 마라: 실행 중심의 3단계 학습 파이프라인 (0) | 2026.02.21 |
|---|---|
| [Setup] Isaac Sim 5.1 & ROS 2 Humble, 충돌 없이 Docker로 완벽 구축 (feat. Pegasus & PX4) (1) | 2026.02.10 |
| [개발환경] Isaac Sim & PX4 & QGroundControl 환경구축 (0) | 2026.01.27 |
| [개발환경] 드론 개발을 위한 시뮬레이션 환경 구축 가이드(ft. Docker, Isaac Sim, Pegasus) (1) | 2026.01.27 |
| [오픈소스] 최근 5년 AI & 로보틱스 기술 트렌드 분석: arXiv 데이터 시각화 대시보드 (0) | 2025.12.19 |

