왜 산업 현장 맵핑은 어려울까?
공장이나 건설 현장 같은 산업 현장에서 로봇 자율주행이나 디지털 트윈을 구현하려고 할 때,
가장 먼저 부딪히는 벽은 바로 '정확한 맵(Map) 생성'입니다. 반복되는 패턴, 부족한 텍스처,
그리고 빠르게 움직이는 기계들 때문에 일반적인 사진 촬영만으로는 3D 재구성이 쉽지 않죠.
가장 먼저 부딪히는 벽은 바로 '정확한 맵(Map) 생성'입니다. 반복되는 패턴, 부족한 텍스처,
그리고 빠르게 움직이는 기계들 때문에 일반적인 사진 촬영만으로는 3D 재구성이 쉽지 않죠.
오늘은 이러한 문제를 해결해 줄 "산업 현장 3D/2D 맵 재구성 데이터셋 가이드" 사이트를 간단하게 만들어서, 공유드립니다!
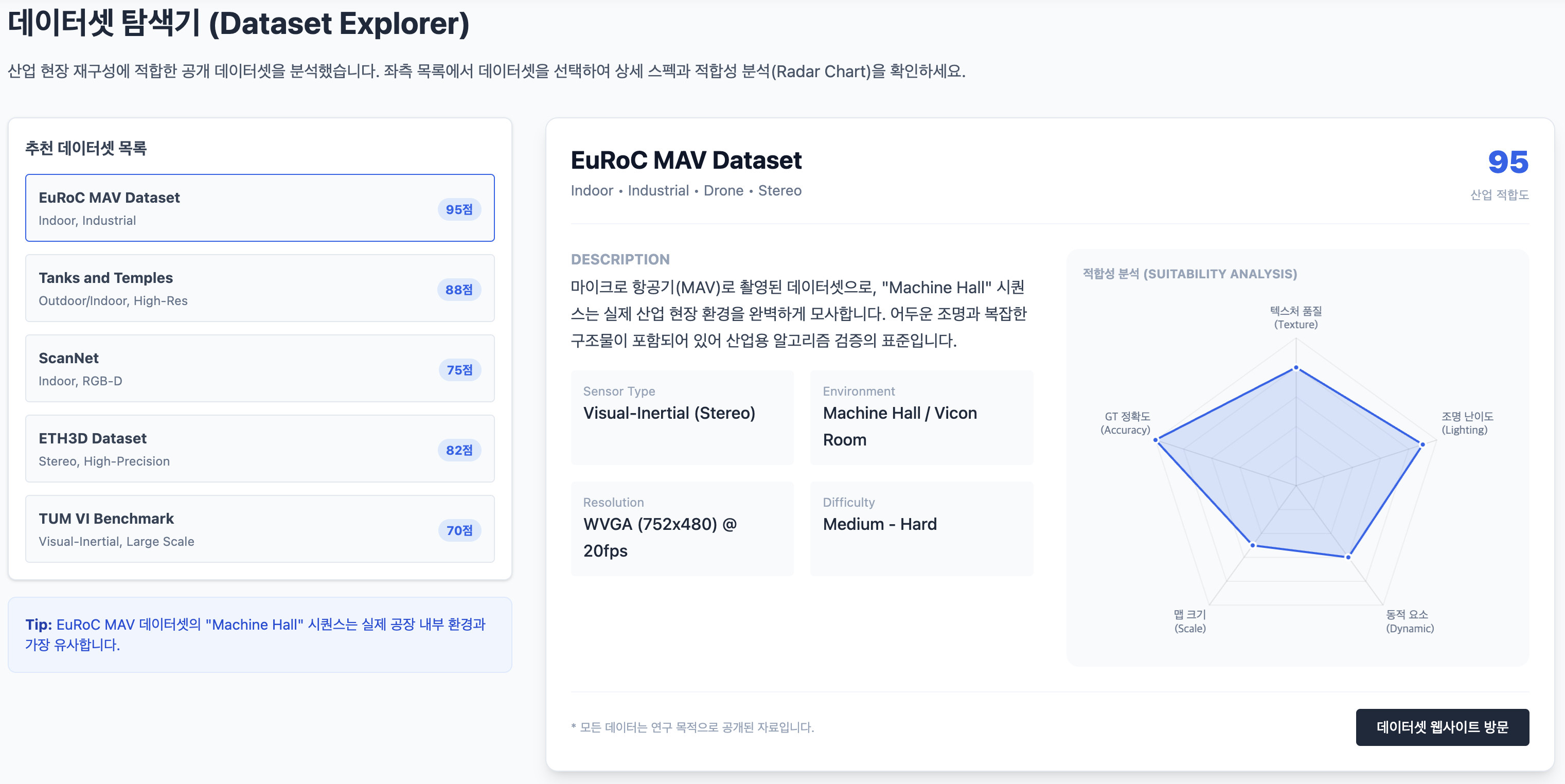
이 사이트에서는 '데이터셋 탐색기'를 제공하여 방대한 공개 데이터셋 중 내 목적에 맞는 자료를 분석해 줍니다.
센서 타입, 환경, 해상도 등을 레이더 차트로 한눈에 볼 수 있습니다.
• 추천 데이터셋: 실제 공장 내부 환경과 가장 유사한 데이터를 찾으신다면 EuRoC MAV 데이터셋의 "Machine Hall" 시퀀스를 추천
https://hms-gymnopedie.github.io/industrial-map-guide/
산업 현장 3D/2D 맵 재구성 데이터셋 가이드
영상(Video) 데이터는 맵핑의 핵심입니다. 시간적 연속성을 가진 프레임은 특징점 매칭(Feature Matching)과 깊이 추정(Depth Estimation)의 정확도를 비약적으로 높여줍니다. 귀하의 연구에 최적화된 산업
hms-gymnopedie.github.io
'🤖 Robotics, 로봇 > SLAM' 카테고리의 다른 글
| [SLAM 기초] 회전표현(Rotation Representation) (0) | 2025.10.07 |
|---|---|
| SLAM 알고리즘 변천사 : 확률적 SLAM부터 딥러닝 기반 SLAM 까지 (0) | 2025.09.23 |

